Autonomous driving cars and also many automated driving systems that assist cars to drive by themselves make decisions based on sensor inputs and algorithms about how the car should behave and react. They rely on cameras, lidars, and radars to understand the road and its complexity. Their decisions need to be reliable, and we must ensure they are making safe decisions all the time. This is where the field of reliability analysis comes into play: we want to be able to quantify how much the car is prone to errors to be able to avoid them as much as possible.
One important aspect is understanding the probability of failure. It is like predicting the likelihood of an autonomous driving car making a mistake. It’s not about whether the mistake will happen, but how likely it is. So, we need to know and be prepared, even if this mistake doesn’t happen often. Another important aspect is the consistency of the behavior of the autonomous car. We want it to be reliable in all conditions, whether it is sunny, rainy, or even snowy.
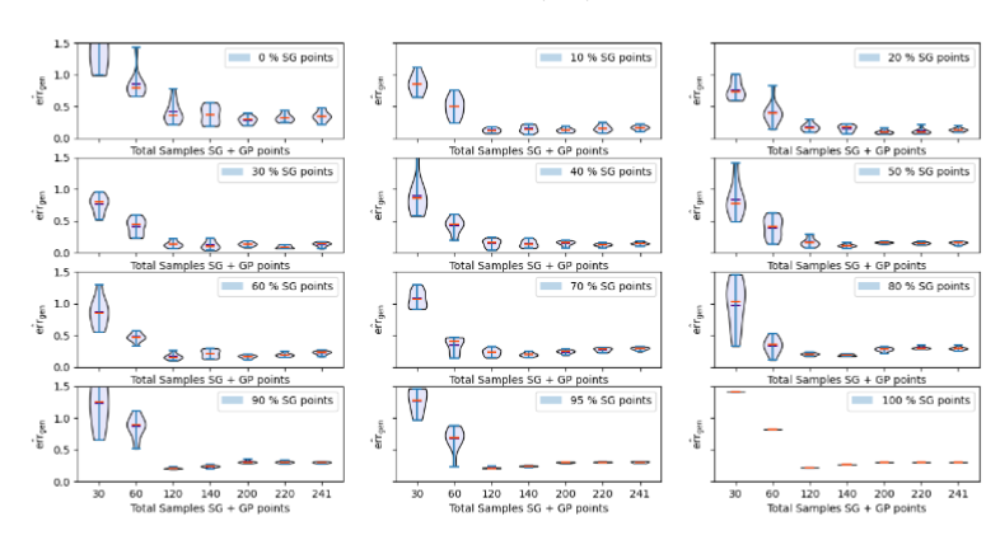
The results of the behavior of these systems are obtained from highly computationally expensive simulation runs. Therefore, we try to minimize the number of times these expensive evaluations are made. To achieve this, we require surrogate models that are capable of closely representing the real system while being more computationally efficient.
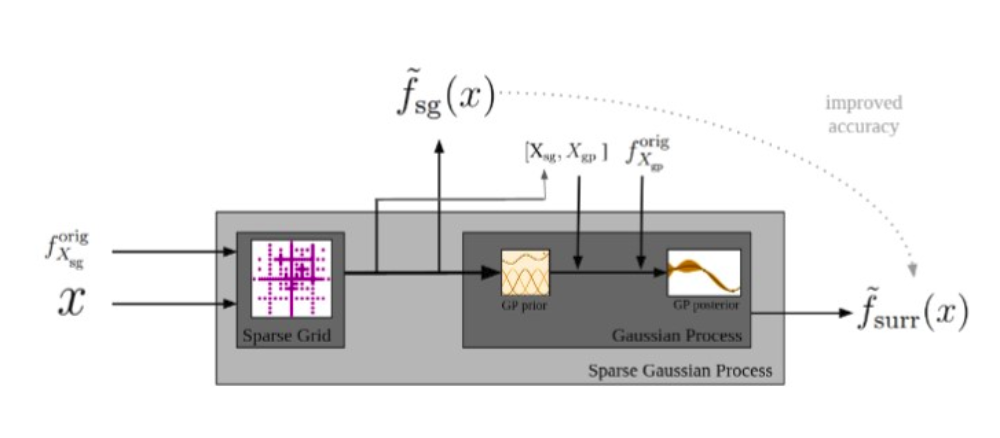
The method we are currently developing uses Sparse Grids (from the SG++ library being developed at the Chair of Scientific Computing) and Kriging. In Kriging, we rely on having a Gaussian Process as a surrogate model. Gaussian Processes are widely used in this field because they provide estimates of means and standard deviations at defined points. Moreover, in Sparse Grids, we need adaptive refinement where we want to focus more on exploring regions of interest.
Key words: Sparse Grids (SG++), Gaussian Processes, Bayesian Optimization, Surrogate Modeling, Uncertainty Quantification, Reliability Analysis
Publication:
[1] N. Baslan, J. Schmidt, A. F. Kerschl, and D. Pflüger, “Towards Reliable Automated Driving Systems: Surrogate Modelling Using Sparse Grids and Gaussian Processes” - UNCECOMP 2023 - EASD Procedia

Dirk Pflüger
Prof. Dr. rer. nat.Head of Institute